Next: Calibration of sensors and Up: The sensors of the Previous: Femto Tools sensor
The sensor consists of a floating platform under the influence of magnetic forces generated by permanent magnets (fig. 4). The weight of the platform is offset by the buoyancy of the floats fixed on the platform. This sensor is designed to run on horizontal stresses and couples oriented vertically only. When the platform is sollicitated, a shift is then measured by three laser sensors arranged in the horizontal direction. An object to be characterized has to be prepared and then fixed in the center of the platform. The operator works on this object with an effector from outside the platform.
The magnetic forces are equivalent to a spring of stiffness ![]() acting in the horizontal direction but also in rotation around the vertical axis. The absence of dry friction makes the sensor extremely sensitive to external stresses. The components of the force and torque are calculated from the equation:
acting in the horizontal direction but also in rotation around the vertical axis. The absence of dry friction makes the sensor extremely sensitive to external stresses. The components of the force and torque are calculated from the equation:
 |
(2) |
The stiffness implemented are about 0.02 N/m and N/rad. The originality of this sensor is that it is equipped with a device providing a measure of efforts without movement of the floating platform. It implements a feedback loop that drives a set of coils used to generate electromagnetic forces who oppose efforts to external efforts applied. It has be shown that injected currents in the coils are the image of these efforts. It is also expected to operate in different modes such as: maintaining a constant effort, release under limited effort, positioning, etc...
The development of this sensor is funded by ANR Psirob Stilmicroforce.
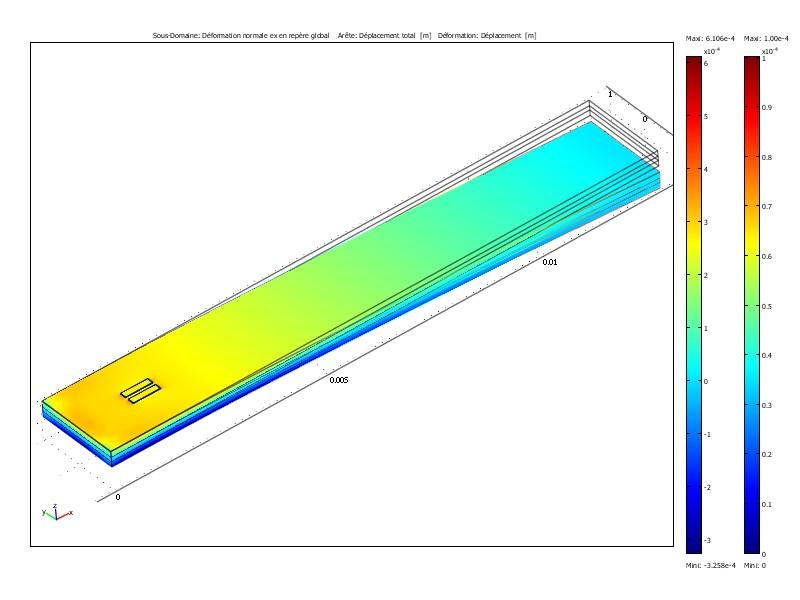
Based on a piezo resistive principle, the developped sensor uses microcantilevers (fig. 5). In this case, the displacement measurement is performed with the variation of the electrical resistance of the cantilever. There is no external displacement sensor needed.
The structure actualy developped is composed of several coupled cantilevers. This work consists in modelling, designing the structure of the sensor, adaptating the range of measurement with a good resolution and reaching a bandwidth in accordance with the dynamic of the measurement.
This sensor will be useful in order to apply large preloads on objects or for force friction measurements .
joel abadie 2008-10-22